snyggt byggt - fräsig kärra!
...som mulle meck säger...
Jag funderar på att slakta mina gyron och bygga en KK också...
men nu håller jag på med BaronPilot, MultiWii och AeroQuad samtidigt---så det får räcka en stund


snyggt byggt - fräsig kärra!
...som mulle meck säger...
Jag funderar på att slakta mina gyron och bygga en KK också...
men nu håller jag på med BaronPilot, MultiWii och AeroQuad samtidigt---så det får räcka en stund
UndCon.com = Under Construction == A constant evolving state of mind...
I valet och kvalet...skall jag föra över Tricopter-delarna till T-coptern eller skall jag laga bakre bommen som blev sned i en olycka häromdagen...
Jag måste ju skruva isär den för att byta bakre bommen...då är steget inte långt kvar till att ta bort allt....tur att jag använt kardborre till det mesta och bara motorerna är skruvade...
UndCon.com = Under Construction == A constant evolving state of mind...
Jag väntar fortfarande på lite delar till Quadcoptern...så jag beställde en Skywalker FPV - En större lite modell än Easy star...
En stor tråd på RCgroups med diverse monteringsalternativ för FPV
Jag kan använda en del saker jag redan har hemma vilket håller priset lägre än att köpa en Easy star och modifiera den.
Denna kommer bli utrustad med
GoPRo HD
Videolänk med separat kamera
Eagletreee OSD, logger samt GPS
Senast redigerat av UndCon den 2010-10-31 klockan 11:12.
UndCon.com = Under Construction == A constant evolving state of mind...
Ungefär vart bör cg vara på en sån dära trikopter? Är det kanske bara att ta ett snöre i varje proppeller och dra ihop dom till ett ovanför och hänga den så och känna om fördelningen känns bra? Liksom oavsett vinklar på armarna.
Man kan räkna sig fram till det - eller bara som jag gjorde - testa sig fram
Jag flyttade saker tills jag kan flyga utan trim eller spakrörelser.
På rcgroups finns det bilder på hur man räknade - men jag kommer inte ihåg i vilken tråd...
UndCon.com = Under Construction == A constant evolving state of mind...
Jag lade CG på min där i centrum där armarna möts, verkar funka fint.
Jag testade även at sätta en digitalkamera (240 g) 120 mm framför centrum, det gick också bra med lite trim.
Jag antar att KKControllern kompenserar genom lite ökat varvtal på de främre motorerna.
/\/\vh // /\/\r J.
Blev förvånad när jag byggde min första tricopter att så få inlägg handlade om cg.
Dom flesta trimmar bort obalanser.
Nästa version av tricopterram skall lyfta en 3 hektos kamera :-| och jag lägger ner tid på att åtminstone kunna flytta om accar å få kameran centrerad undertill.
Det som var klurigt var beroende på kameran var med eller inte när man flyger...
om jag tar bort kameran och ett 2200 mah batteri och ersätter det med en 5000mah acce så får jag nästan samma cg som med kamera och mindre batteriet
utan kamera och med mindre batteri måste jag ge en hel del utslag för att hovra (baktungt) - men det är helt ok att flyga så med.
UndCon.com = Under Construction == A constant evolving state of mind...
Uppdatering...
Mina motorer och ESC's till Quaden har anlänt
10st servon för flyg och kameraupphängningar är skickade.
Starkare videosändare och GPS till Eagletree är skickat.
22-20L blev det och dessa kommer monteras på armar som låter mig montera allt utan att förlänga kablaget.
I mitten hamnar min EDB jag skrev om tidigare.
Skulle det bli ostadigt pga korta armar(ca 35-40 cm) så är det bara att skruva loss dessa och sätta dit nya armar samt förlänga kablaget något.
För en tid sedan beställde jag propellrar från Conrad (till deras Quad (Reely))
Dessa är förpackade 2+2 dvs 2 moturs och 2 medurs i ett paket.
Storleken är 10*4.5
Mata detta med ett Arduino Mega och Wii-sensorerna (WMP+NCK) så har vi en fin Quad som är utbyggbar med GPS, Altimeter och annat kosmetiskt.
Kamera för foto/film/fpv kommer monteras i en gyroupphängd vagga och där har vi en liten GoProHD så det klarar sig troligen med ett 9g servo till detta
UndCon.com = Under Construction == A constant evolving state of mind...
Tänkte bara visa hur jag byggde min trikopter.
(tanken är att kursiv text skall vara klickbar)
Följande stuff´s köptes från Kina: tailboom & bomhållare från HK. Skall sitta på GT500. Ett par 2,5 mm kolfiberplattor samt 3 st Turnigy motorer och en liten UBEC.
Struntar i proppsaver för dessa propellrar går sönder direkt. Och så tänkte jag inte på att de säljs i 5 pack så jag fick 30 st. 4 st Gyrosar HK401B
Fartreglege tog jag ett jag hade hemma och köpte 2 till från rcflight.
Sedan skruvade jag ihop allt enl bilderna. Vridningen till tailen kommer från bakaxlen på en gammal radiostyrd bil. Servot är ett rött servo.
Använder kanalerna 1,6,2 till swash/cyclic. Kanal 4 till roder via gyrot. Kanal 8 till cyclic gyrona ställbar gain med ratt och dom körs i rate mode.
Kanal 9 till tailservot som körs i headlock mode även den ställs med ratt på radion.
Swash inställningar just nu:
AIL> -35%
ELEV> +35%
PITC> +100%
Pitch kurvan som (styr motorernas varv)
7>+70
6>+60
5>+35
4>+10
3>-20
2>-50
1>-100
Nu skall jag försöka ta reda på allt om sån dära wiiii kontroll grej som verkar fiffig för att hålla den plan.
Himla snyggt!
Fiffigt med bakaxeln -det är lite tjusningen med det hela tycker jag att man kan lösa sakerna på så många olika sätt.
(min T-copter får en vanlig HK450 bladhållare - men det ser himla klent ut tycker jag)
UndCon.com = Under Construction == A constant evolving state of mind...
Glömde att skriva att jag hittade mina bilder från bygget av Quad-ramen
LÄNK
Fasen vad gott det är med en unimat3
UndCon.com = Under Construction == A constant evolving state of mind...
En bild på min "nya" ram....ingen snygging men en förbättring jämfört med föregående modell.
Framförallt lättare!!
Centrumram tillfilad av kretskort från en Avyaswitch.
Önskar en Unimat3 i julklapp! (hoppas tomten läser detta)
/Z

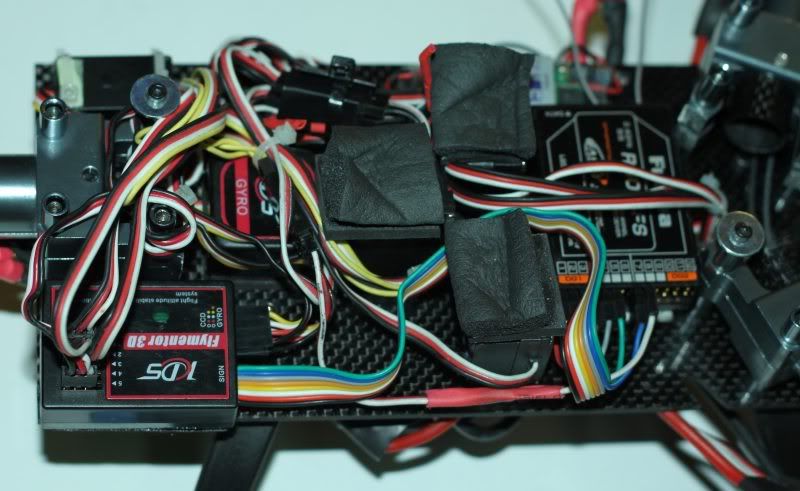
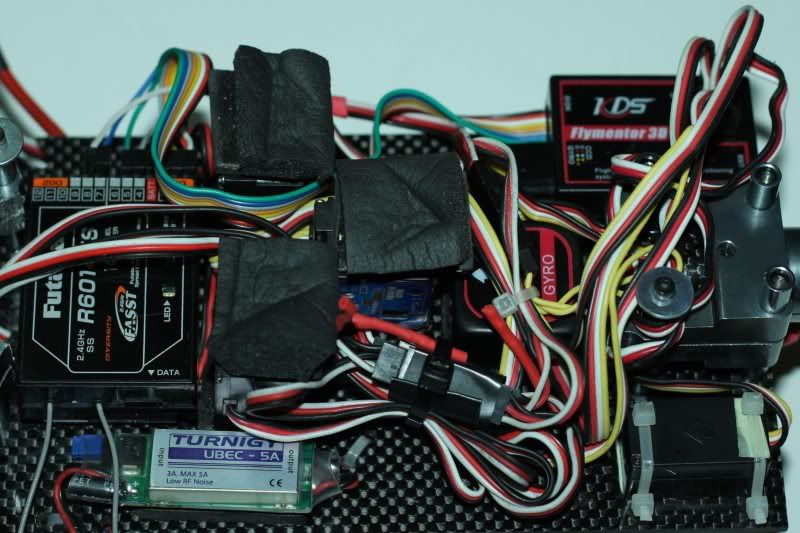
Lägger in en bild med motorer och ESC's lite provisoriskt monterat - testar lite med dämpning till elektroniken/gyrona
vikt på bilden 750 gram...
UndCon.com = Under Construction == A constant evolving state of mind...
Trevlig Quad där Undcon!
Själv testar jag just nu en sån dära Flymentor på min tri. Första testet inne i trångt garage var intressant. Men verkar att fungera bra som "balancing holder". Väntar ut regnet just nu för att få pröva mera. Denna pryl går att använda med 7 kanals mottagare med. Men jag valde att ta 14 för att nu kan jag ändra alla 3 sorters gyro gain´s med rattarna på radion. Så fortsättning följer om detta.
Senast redigerat av TommyzT den 2010-11-21 klockan 11:00. Anledning: ja
mitt nya projekt.
Bifogad fil 16665
Senast redigerat av dacke jocke den 2010-12-02 klockan 20:26. Anledning: 2 bilder
Trevliga byggen
Mer sådant, jag har varit lite slö på uppdatering men borde få min Quad i luften snart..."skall bara" kamerafästet ligger på arbetsbänken - i övrigt startklar och lite testad utan propellrar
Senast redigerat av UndCon den 2010-12-03 klockan 11:55.
UndCon.com = Under Construction == A constant evolving state of mind...
Hur kan quad,hexa och octokopter kan får till sidoroder effekt utan roder tilt/lutning på ena motorn?
Eller är det skev höjdroder?
Ena hälften av motorerna snurrar fiffigt åt ena hållet och andra hälften åt andra hållet "cw & ccw" . Tex på en quad 2 höger varv och 2 vänster. Snurrar ett par långsammare, så vrider den sig.Ursprungligen postat av dacke jocke

Själv kastade jag mig in ett nytt projekt innan jag blev helt klar med Trikoptern. En quad blir det om jag fattar vad f´n jag skall göra med delarna jag har framför mig. Wii motion+ och Wii Nonchackos och Argdino kort mm. Kommer förmodligen fråga Undcon ett och annat. För det jag vet om elektronik är inte värt att veta.

Senast redigerat av TommyzT den 2010-12-03 klockan 16:58. Anledning: ja
Har ni kikat på Dramidas hybrid tricopter??
http://www.rcgroups.com/forums/showp...postcount=7821
/Z
 Behörigheter för att posta
Behörigheter för att posta

 Svara med citat
Svara med citat